Modeling and Control for a Class of Tendon-Driven Continuum Mechanism
Autor*in: Bastian Deutschmann
ISBN: 978-3-95900-440-4
Dissertation, Leibniz Universität Hannover, 2020
Herausgeber*in der Reihe: Jessica Burgner-Kahrs
Band-Nr.: LKR 01/2020
Umfang: 225 Seiten, 75 Abbildungen
Schlagworte: Continuum Mechanisms, Underactuated Systems, Soft Material Robotic Systems
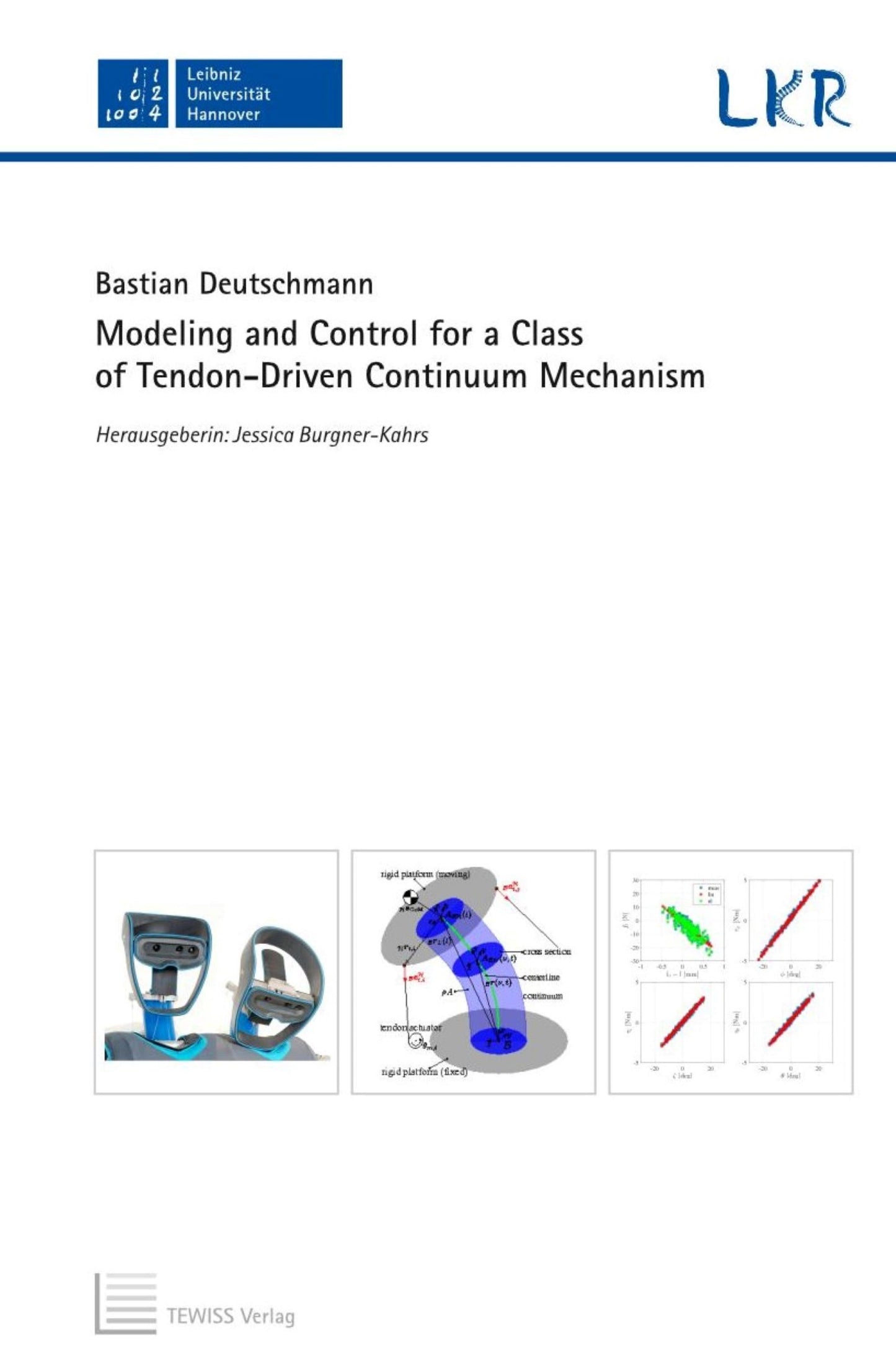
Kurzfassung: This thesis contributes to the emerging field of soft material robots and treats modeling, state estimation and control for a special class of continuum mechanisms.
The overall outcome of is a novel treatment of a continuum in robotics research. At first a description of the overall system as a tendon-driven multi-body system modeled by a nonlinear rigid-body dynamics is proposed. In combination with the introduced real-time pose and velocity estimation, nonlinear model-based control in real-time is possible. Furthermore, the structural properties of the model allow employing modern control methods for underactuated mechanical systems which are adapted to provide set point control for the upper platform. The developed methods in modeling, state estimation and control presented in this work are experimentally validated on a humanoid robot. Due to their promising results, this thesis lays the foundation for the use of tendon-driven continuum mechanisms as generic joint modules for modular robotic systems which may mark the beginning of a new generation of light-weight robots.